VRロボット訓練の有効性
ロボット手術がますます一般的になり、外科医は従来の技術とは異なる独自のスキルを習得する必要があります。シミュレーション訓練はこれらのスキルの開発を支援し、患者の安全性を高めます。テキサス大学サウスウェスタン医療センター(UTSW)は、外科レジデント訓練のためのVRロボットシミュレータの実行可能性、有効性、スキル移転性を評価する研究を実施しました。
Radi I, Tellez JC, Alterio RE, Scott DJ, Sankaranarayanan G, Nagaraj MB, Hogg ME, Zeh HJ, Polanco PM. (2022年2月22日) 一般外科レジデント向け革新的な習熟度ベースVRロボット訓練プラットフォームの実行可能性、有効性、スキル移転性。Surgical Endoscopy 36(10): 7279–7287.
https://doi.org/10.1007/s00464-022-09106-z
実践訓練は医学教育の基本構成要素です。この段階で得られる知識と経験は将来のエラーを最小限に抑える上で重要です。外科訓練のためのVR使用は、研修医の技術的・手動スキルの構築と向上に効果的かつ安全な環境を提供します。
学生向けVRロボット訓練
研修医レベルでの包括的外科医訓練が不可欠です。ロボット支援手術(RAS)は振戦低減、器用性の向上、3D視覚化などの利点を提供しますが、特定のスキル開発も求められます。経験不足のオペレーターは限定的な触覚フィードバックや複雑なシステム操作などの課題を克服するのに問題を抱える可能性があります。
2019年から2021年にかけて、テキサス大学サウスウェスタン医療センター(UTSW)は研修医のコアロボット手術スキルの開発を目指した革新的なVRカリキュラムを実施しました。研修医はSimNow® VRタスク33個を実行し、総合スコア≥90(100点満点)を達成するまで続け、これは習熟度として定義されました。
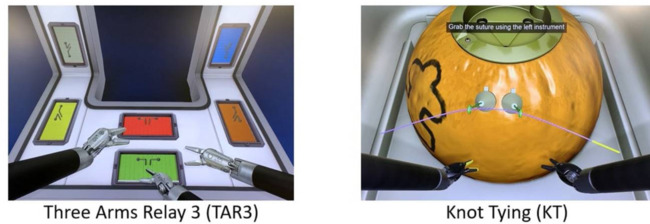
VRタスクにはAround the World Needle Driving、Big Dipper Needle Driving、Ring Roller Coaster 4、Knot Tying、Three-Arm Relay 3が含まれました。最初の4タスクは非生物タスクとの類似性から選択されました。
訓練により研修者の83%が33のVRタスクすべてで習熟度を達成しました。前テストと比較して、全研修者をグループとして、PGY2のみ、PGY4のみを考慮した場合でも、全タスクの全VR指標で後テストでのパフォーマンス向上が観察されました。
4つの仮想現実タスクすべてで全体的なパフォーマンスの明確な改善が観察されました。同時に、タスク完了時間は大幅に短縮され、動作の経済性も顕著に向上しました。これらの所見は、VRプラットフォームでの訓練が研修医の精神運動制御を向上させ、より効果的かつ効率的なタスク遂行をもたらしたことを示唆しています。
VRを通じた改善
外科訓練のための仮想現実の使用は、研修医の技術スキルを向上させる効果的かつコスト効率の良い方法を提供します。没入型でインタラクティブなシミュレーションを通じて、VRは学生が制御されたリスクフリーな環境で外科手技を繰り返し練習することを可能にします。
この継続的な曝露は、実際の手術室時間の制約なしに精度、手眼協調、意思決定能力を向上させるのに役立ちます。VR訓練は物理的リソースと監督の必要性を減らし、外科機器へのアクセスが限られた機関にとって実用的なツールとなります。
仮想環境から実環境へのスキル移転性は、VRシミュレーションをロボット外科訓練の主要な初期構成要素として使用することの肯定的な意味を裏付けています。単一施設に限定されるものの、この研究はVRベースのロボット訓練が早期外科教育に有効で拡張可能な方法である強力な証拠を提供します。今後の研究はVRパフォーマンスメトリクスの検証と実際の手術室環境へのスキル移転評価に焦点を当てるべきです。
詳細については、以下にお問い合わせください
info@medicalholodeck.com
2月 2022